App
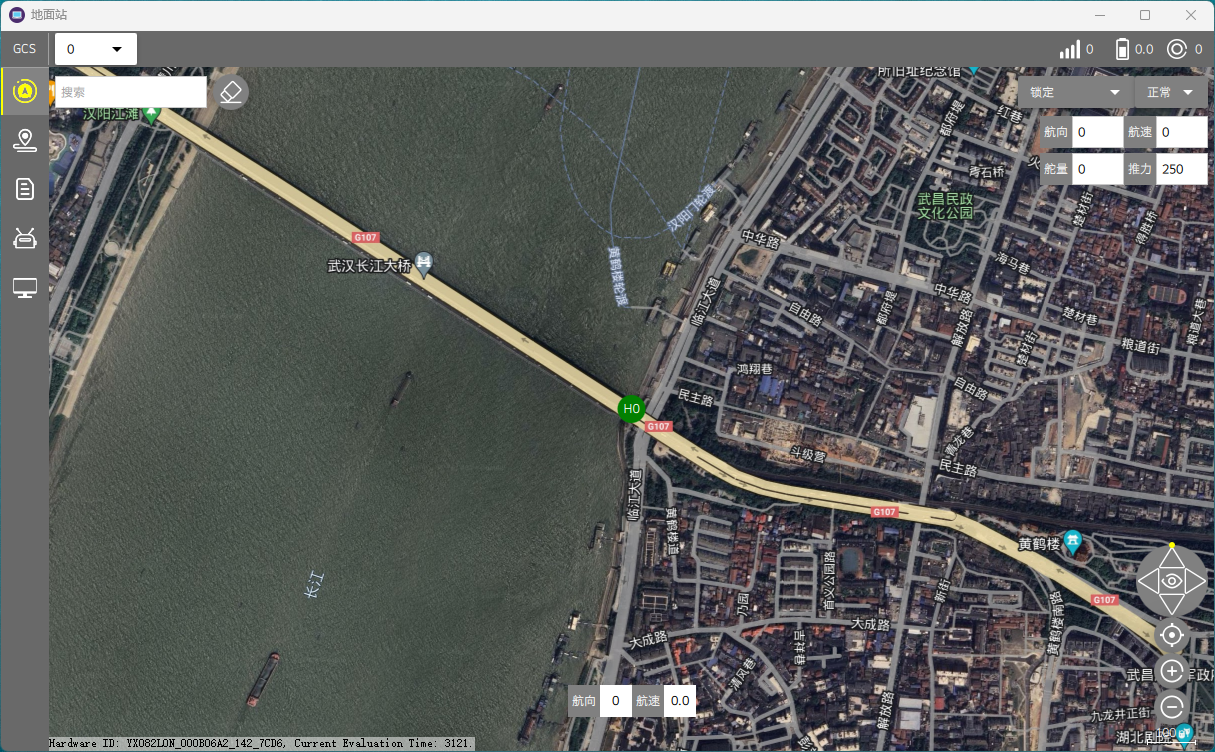
App分为三大区域:导航栏、状态栏和中心地图区域。功能按钮以图标形式呈现,鼠标悬停3秒可查看提示。
概览
基本功能
操控
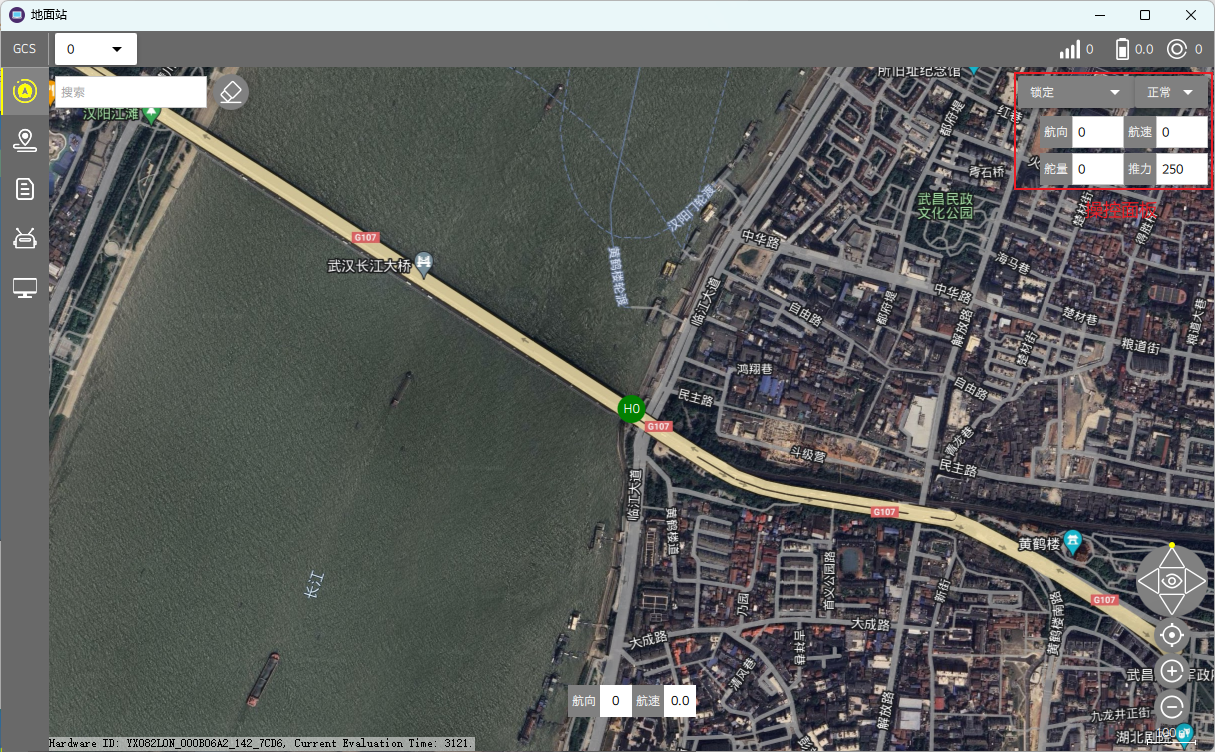
操控
航向:0-360(°)。
航速:0-5(m/s)。
舵量:-1000到+1000,负左正右。
推力:-1000到+1000,负退正前。
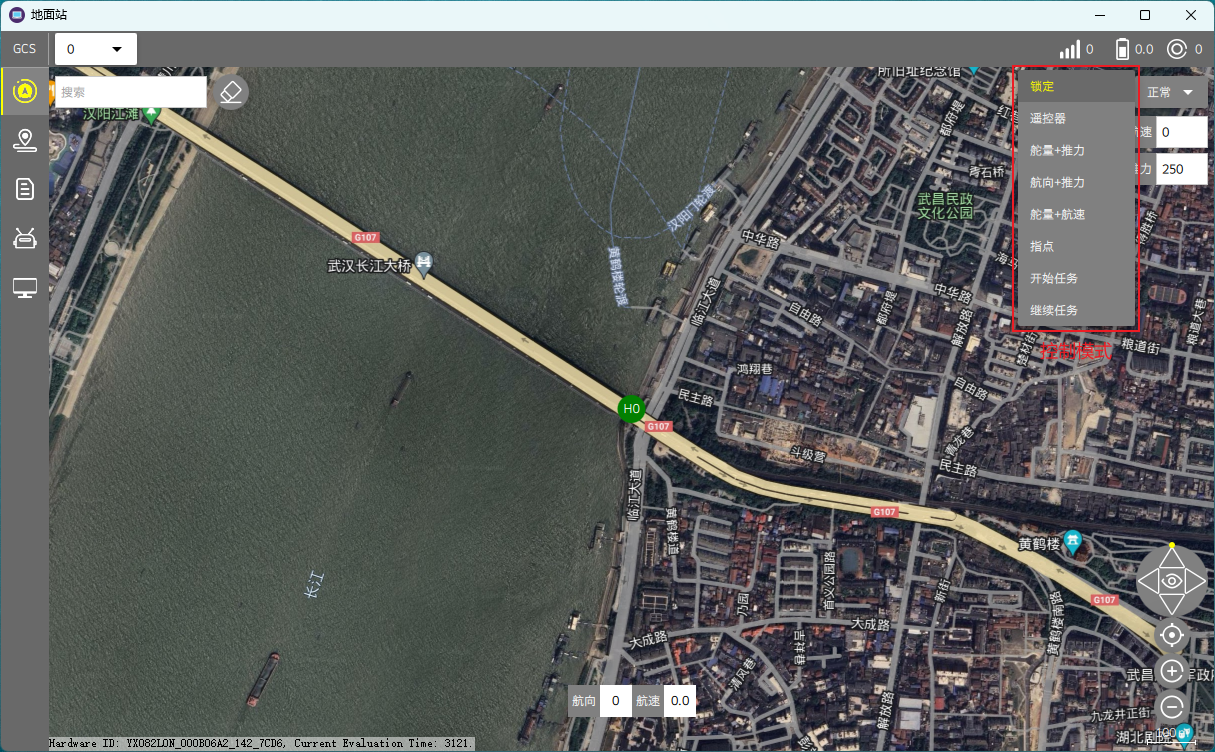
控制模式
系统提供8种控制模式,分别如下:
锁定:锁定后,无法通过摇杆操作载具。
摇杆:通过摇杆操作载具。
舵量+推力:输入给定舵量和推力进行控制。
航向+推力:输入给定航向和推力进行控制。
舵量+航速:输入给定舵量和航速进行控制。
指点:载具跟踪指定的目标点。
开始任务:执行由App发送的任务,从第一个任务点开始执行。
继续任务:执行由App发送的任务,从之前执行点的下一个任务点开始继续执行。
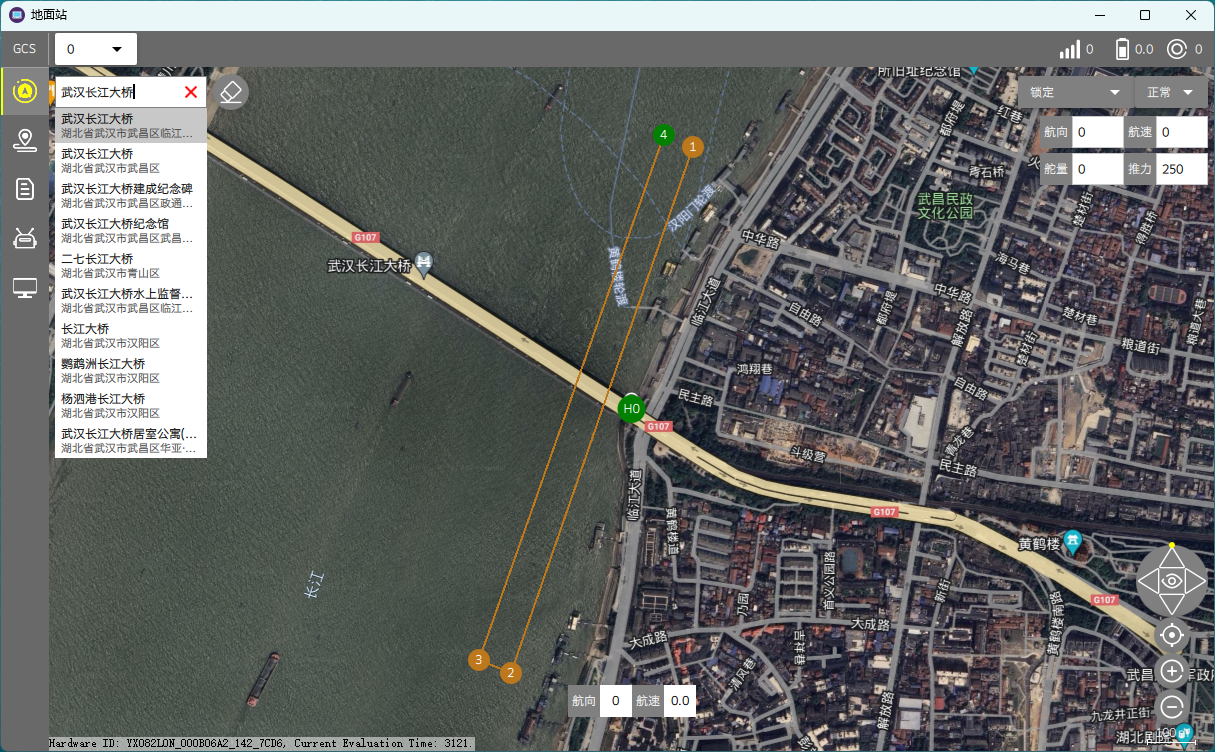
任务
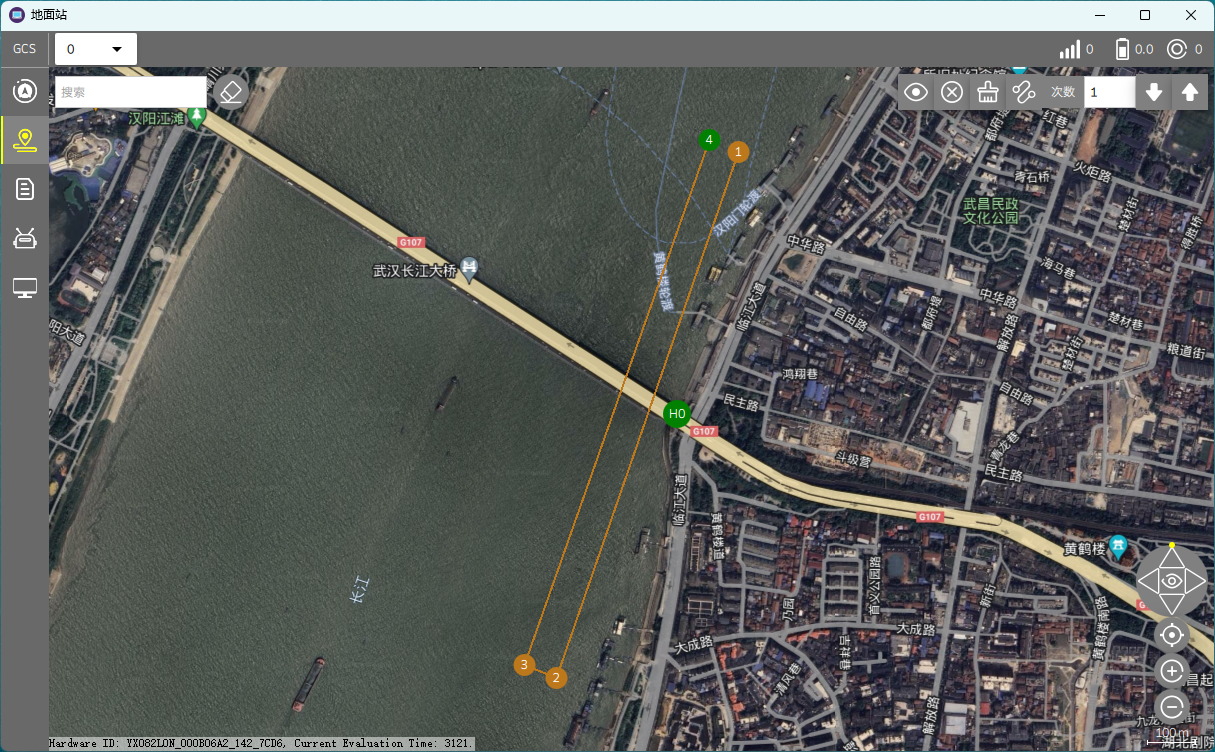
任务
点击地图可添加任务点,中心键使任务居中,删除键删除选中任务点,清除键清除全部任务点。计算键生成均匀分布的任务点。执行次数默认为1,输入0表示任务执行完成后回到起点。上传键上传任务至载具,下载键从载具获取任务。
日志(暂不开放)
载具
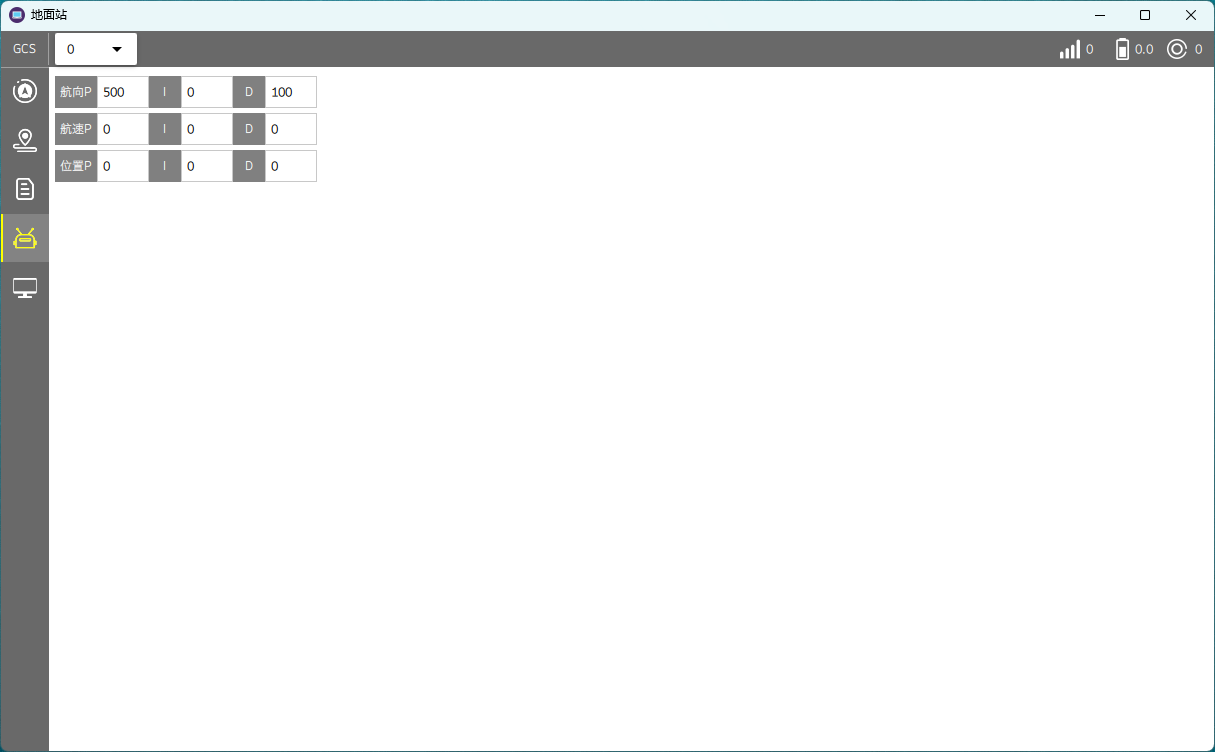
载具
载具参数设置完成后,参数将保存在载具中。
设置
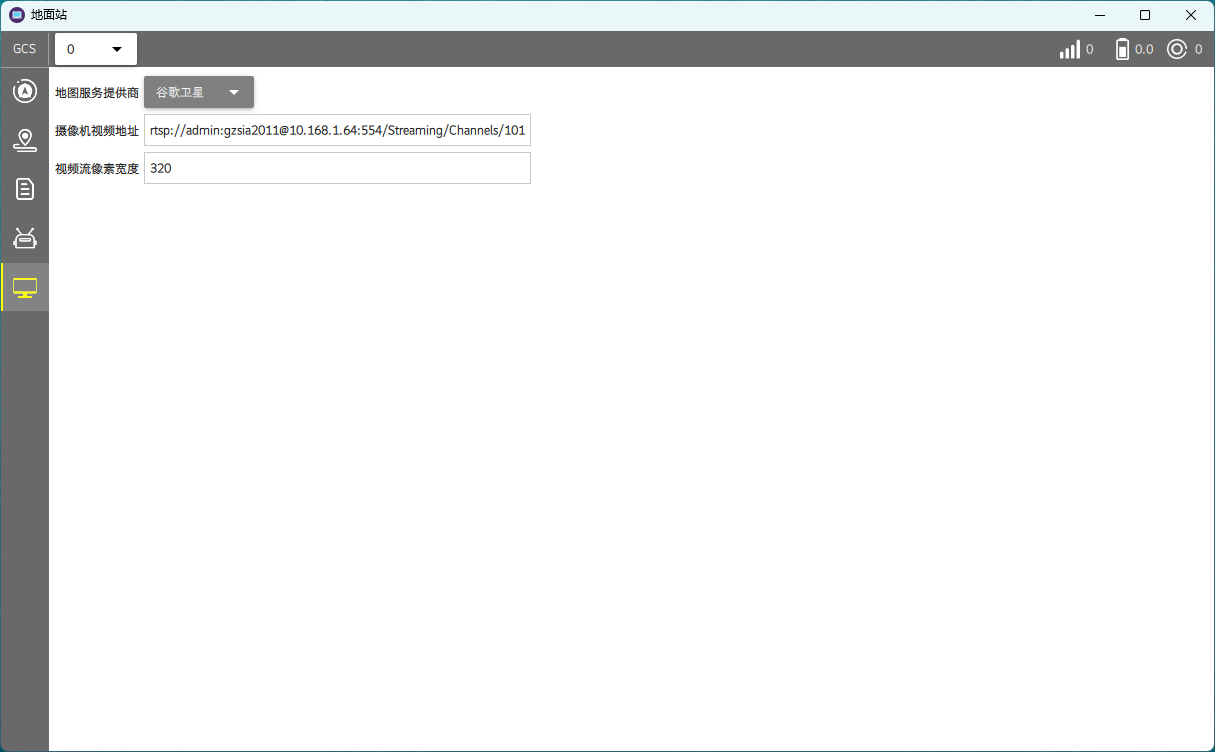
设置
可设置地图服务提供商、摄像机视频地址。
状态栏
右上角状态栏显示载具通信延时和电量百分比,底部中间状态栏显示当前的航向和航速。
地图
地图
地图具备搜索、旋转、调整俯仰角、缩放功能。
快捷键
刷新:按F5。
平移:使用方向箭头。
旋转:按Ctrl+左/右箭头。
倾斜:按Ctrl+上/下箭头。
缩放:滚动鼠标或捏合/弹开触摸板。