PID控制原理
PID控制是通过调整比例、积分和微分三个参数,来使系统输出逼近期望值的一种控制策略。
公式
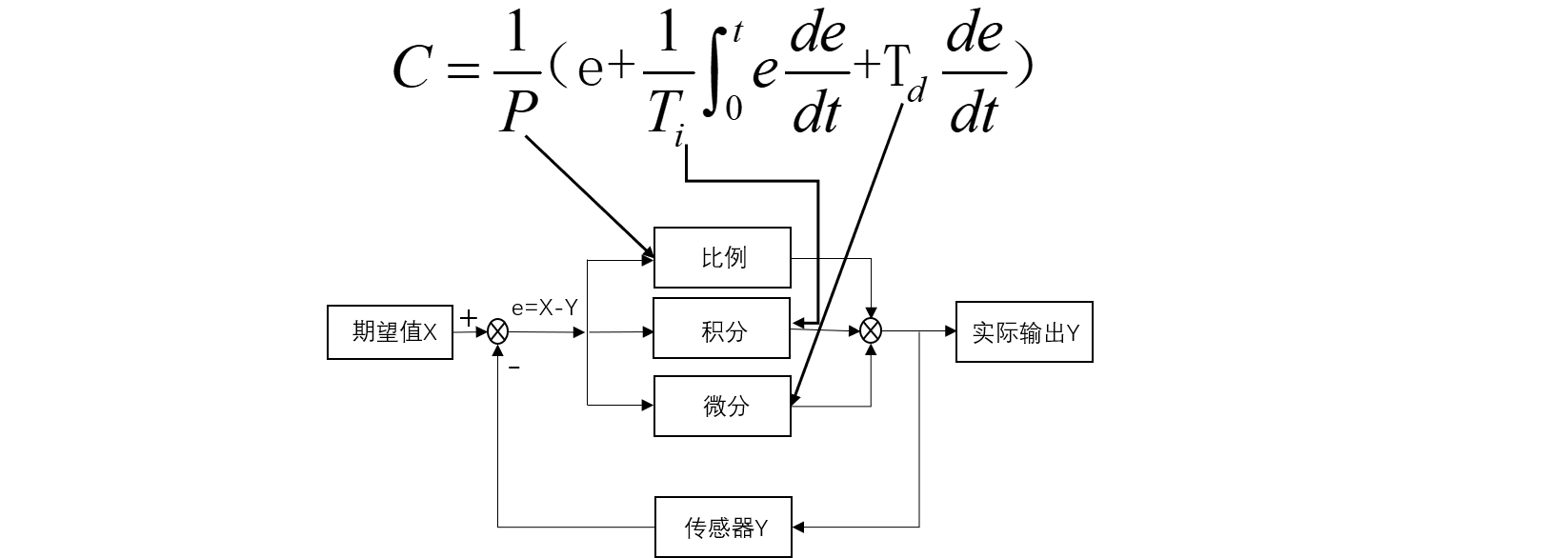
公式
各项作用
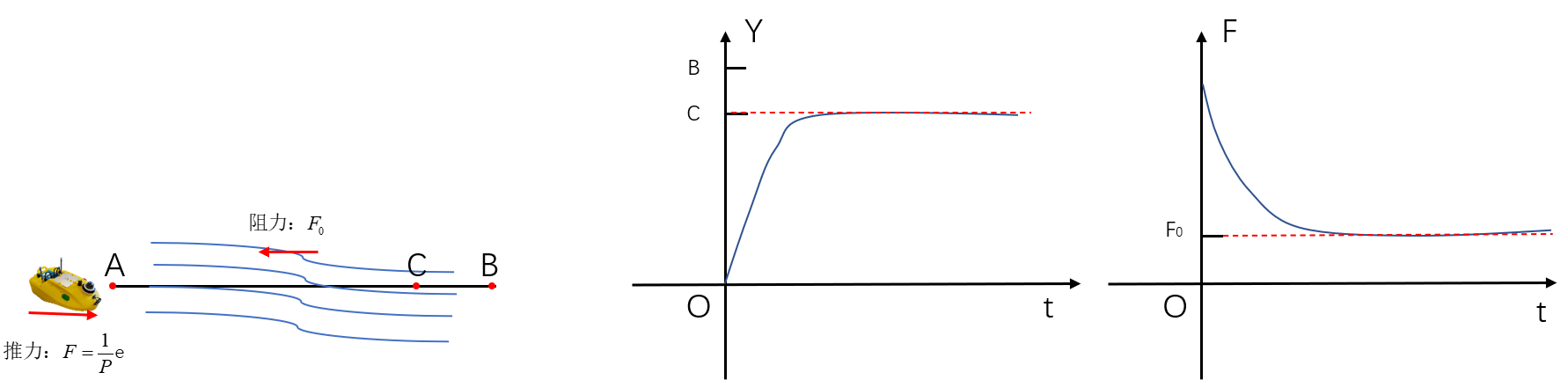
比例项
比例项
假设载具受到的推力F=e/P,受到的阻力为F0,其中e等于载具当前位置与期望点B的距离,若只有比例项作用,随着载具的位置靠近B点,载具受到的推力F逐渐减小,假如在C点位置推力大小等于阻力,此时载具始终与期望点具有一定的距离。
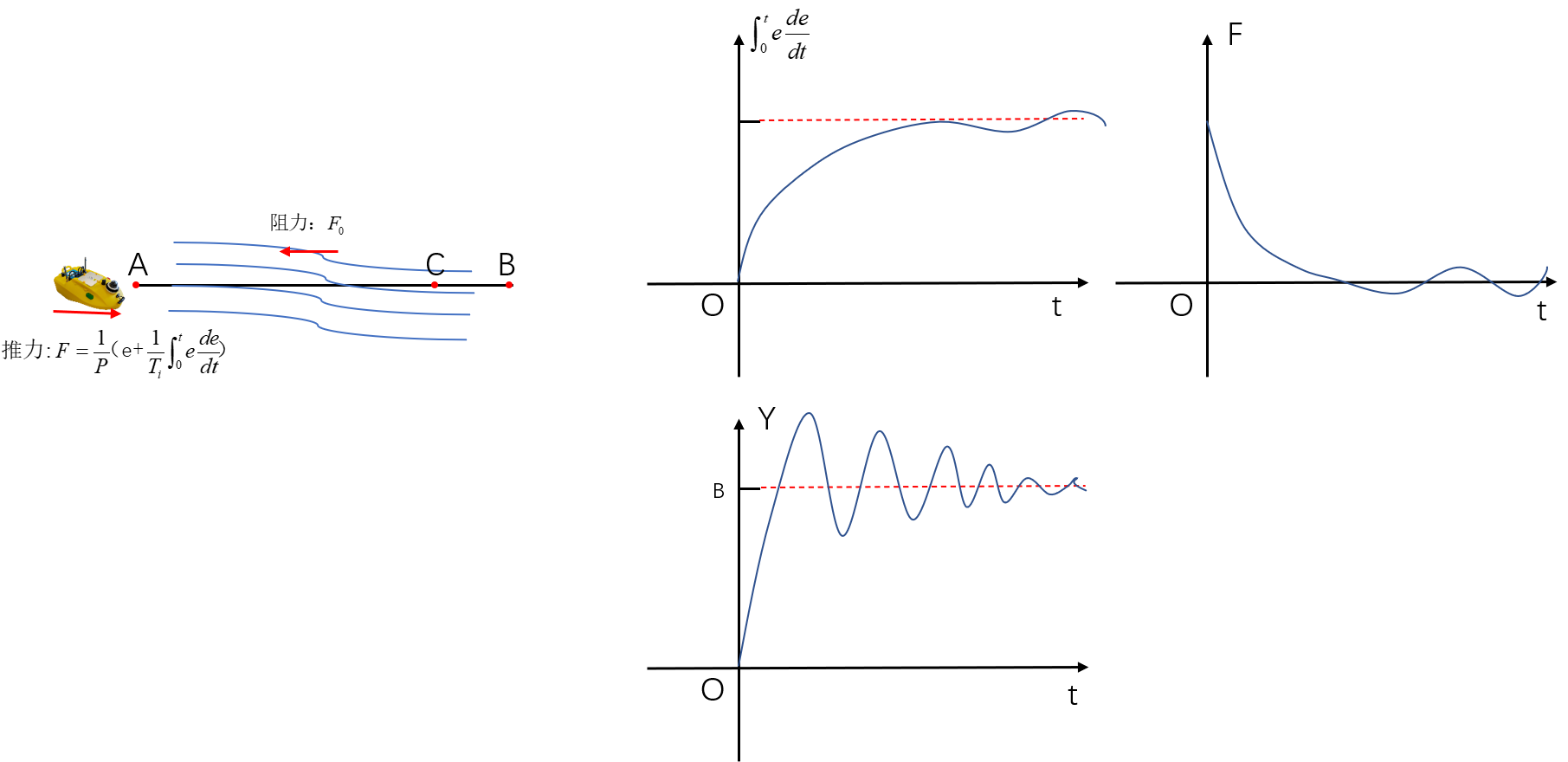
积分项
积分项
只有比例项作用时,载具始终与期望点存在一定距离,故此时在比例项的基础上加入积分项。随着e在时间上的积分,积分值越来越大,最终F在比例项与积分项的作用下,载具的位置可能超出期望点的位置,此时e为负值,在比例项的作用下,推力可能小于阻力导致载具后退,故载具位置在期望点位置震荡。
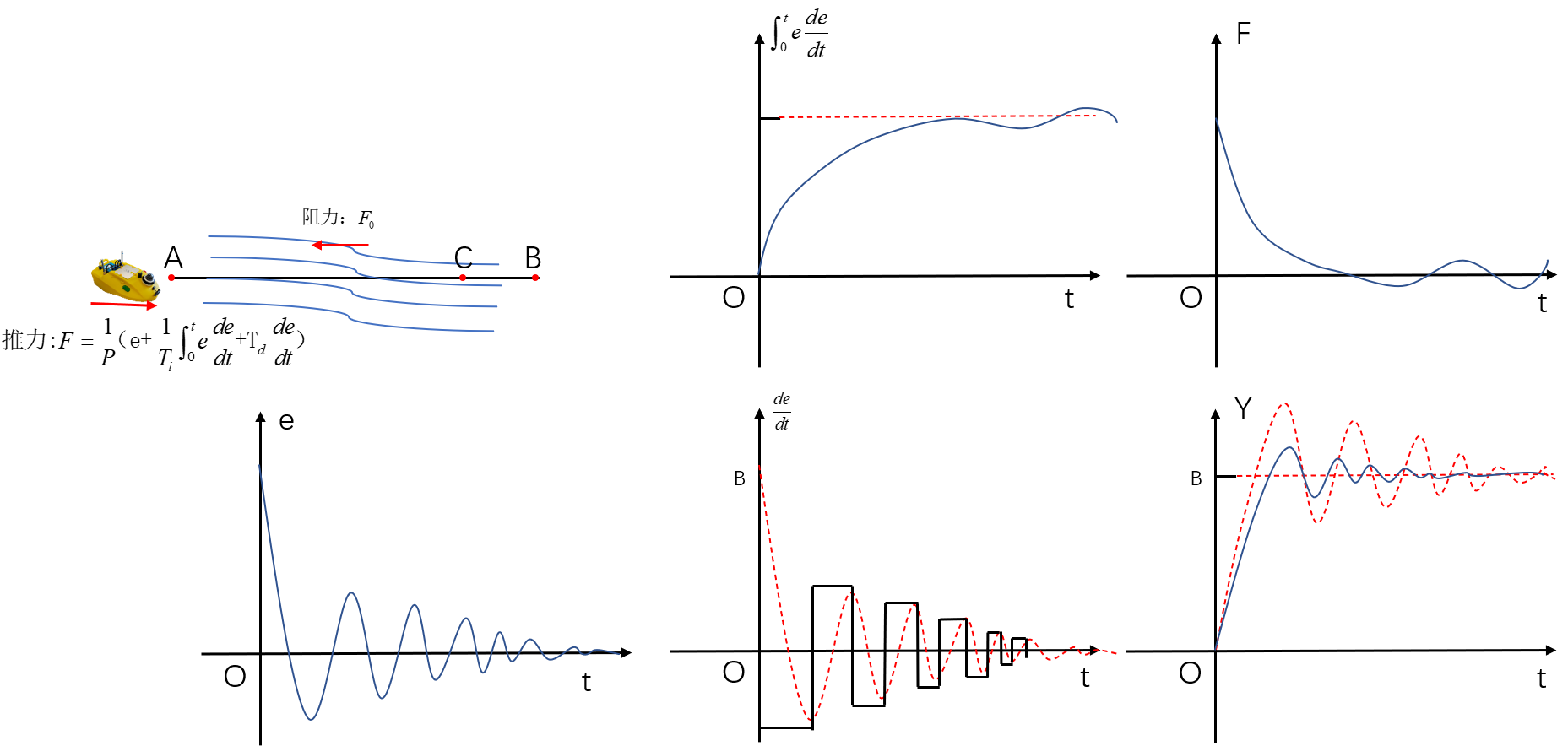
微分项
微分项
为了让载具快速收敛到期望点位置,加入微分项,微分项描述的是e的变化趋势,通过减小e的变化趋势,进而减小震荡幅度,达到快速收敛的目的。